在深圳人形机器人街上散步,火到国外
来源:无毒不丈夫网
时间:2025-01-16 03:38:23
国产机器人在深圳街头散步,火到国外直接火到国外。深圳上散步态、人形人街速度、机器稳定性在各个方面都与人类相似。火到国外 而且很容易走出十几米,深圳上散旁边都是人形人街围观者。  假如穿上衣服,甚至有模特走台阶的火到国外感觉。
假如穿上衣服,甚至有模特走台阶的火到国外感觉。  Jim,英伟达科学家 Fan看了有点怀疑自己的人形人街眼睛:这是真的还是Sora合成?……
Jim,英伟达科学家 Fan看了有点怀疑自己的人形人街眼睛:这是真的还是Sora合成?……  毕竟,人形机器人的机器步态仍然充满了机器味,很容易摔倒。火到国外
毕竟,人形机器人的机器步态仍然充满了机器味,很容易摔倒。火到国外  网友们一扒,太神奇了。人形人街这个机器人刚刚发布了半个月,最近参加了CES。
网友们一扒,太神奇了。人形人街这个机器人刚刚发布了半个月,最近参加了CES。  在国内互联网上,另一个视角的视频也发布了。
在国内互联网上,另一个视角的视频也发布了。  网友们发现,这款人形机器人刚刚发布一个月。在官方视频中,它还可以做蹲起和俯卧撑。
网友们发现,这款人形机器人刚刚发布一个月。在官方视频中,它还可以做蹲起和俯卧撑。  当然,这个时候只剩下大家了“连续的amazing”了。
当然,这个时候只剩下大家了“连续的amazing”了。  仔细看,这个国产机器人诞生于深圳,背后的公司成立不到一年半。大部分核心团队都是小鹏机器人团队和商汤投资的。 而且,它的成本并不高。 创始人赵同阳在接受采访时表示,该机器人的成本控制在10万元以内,产品的最终价格可能在15万元左右,两个月后可以小规模商业化。 人形机器人挑战俯卧撑 例如,上述人形机器人来自众擎机器人,这是他们最新发布的旗舰SE01。 根据众擎官方显示,SE01已经能够像真人一样在实验室环境中行走,步态非常接近。
仔细看,这个国产机器人诞生于深圳,背后的公司成立不到一年半。大部分核心团队都是小鹏机器人团队和商汤投资的。 而且,它的成本并不高。 创始人赵同阳在接受采访时表示,该机器人的成本控制在10万元以内,产品的最终价格可能在15万元左右,两个月后可以小规模商业化。 人形机器人挑战俯卧撑 例如,上述人形机器人来自众擎机器人,这是他们最新发布的旗舰SE01。 根据众擎官方显示,SE01已经能够像真人一样在实验室环境中行走,步态非常接近。  而且还可以靠手臂和脚趾支撑,模仿人类做俯卧撑,动作是一个标准: 根据官网信息,SE01身高1.7米,相当于一半成年人,机身采用航空级铝材,整机净重55公斤。 SE01全身有32个自由度,正常行走速度为每秒2米(每小时7.2公里),电池寿命为2小时,使用寿命为10年。 在处理器方面,SE01由英伟达和英特尔控制。
而且还可以靠手臂和脚趾支撑,模仿人类做俯卧撑,动作是一个标准: 根据官网信息,SE01身高1.7米,相当于一半成年人,机身采用航空级铝材,整机净重55公斤。 SE01全身有32个自由度,正常行走速度为每秒2米(每小时7.2公里),电池寿命为2小时,使用寿命为10年。 在处理器方面,SE01由英伟达和英特尔控制。  在感知能力方面,SE01拥有英特尔RealSensense 配备360度激光雷达和6个高清摄像头的D435深度相机。 支持3D感知避障导航的多层规划算法可以自动选择最佳路径。
在感知能力方面,SE01拥有英特尔RealSensense 配备360度激光雷达和6个高清摄像头的D435深度相机。 支持3D感知避障导航的多层规划算法可以自动选择最佳路径。  正如前面所说,SE01全身有32个自由度,其中12个在手(单手6个)、臂部8个(单臂4个)。 SE01的手臂可以通过肩部和肘部的谐波关节精确控制,并用绳子驱动柔性力控制,以确保动作的准确执行。
正如前面所说,SE01全身有32个自由度,其中12个在手(单手6个)、臂部8个(单臂4个)。 SE01的手臂可以通过肩部和肘部的谐波关节精确控制,并用绳子驱动柔性力控制,以确保动作的准确执行。  核心关节还可以实现精确的力控,最大扭矩186牛·力控精度可达0.2牛·米。 而且SE01核心关节的高性能部件都是众擎团队自主研发的。
核心关节还可以实现精确的力控,最大扭矩186牛·力控精度可达0.2牛·米。 而且SE01核心关节的高性能部件都是众擎团队自主研发的。  简单总结一下,SE01的亮点在于下肢能力和超拟人步态。 然而,据路透社报道,它的稳定性仍有改善的空间,在外部演示中也遇到了滑倒和摔跤的问题。
简单总结一下,SE01的亮点在于下肢能力和超拟人步态。 然而,据路透社报道,它的稳定性仍有改善的空间,在外部演示中也遇到了滑倒和摔跤的问题。  有人还开玩笑说,背部的抓手是为了防止摔倒吗?
有人还开玩笑说,背部的抓手是为了防止摔倒吗?  电机关节自主研发,运动算法开源 目前,中引擎机器人表现出几个特点: 坚持做双脚,价格低,强调开源。 目前众擎有三个产品系列: SA系列:面向科研教育场景的双足机器人,全开源SE系列:面向工业劳动场景的人形机器人,高负荷EV系列:适合家庭场景的人形机器人,第一款高可靠、长寿命的双足机器人SA01,售价仅为3.85万元。双腿和髋部电机都是自主研发的,运动算法完全开源。 但这还不是最低价。还有一个小尺寸的双足机器人,售价只有1.85万元。
电机关节自主研发,运动算法开源 目前,中引擎机器人表现出几个特点: 坚持做双脚,价格低,强调开源。 目前众擎有三个产品系列: SA系列:面向科研教育场景的双足机器人,全开源SE系列:面向工业劳动场景的人形机器人,高负荷EV系列:适合家庭场景的人形机器人,第一款高可靠、长寿命的双足机器人SA01,售价仅为3.85万元。双腿和髋部电机都是自主研发的,运动算法完全开源。 但这还不是最低价。还有一个小尺寸的双足机器人,售价只有1.85万元。  △SA01 据官方介绍,SA01 整机EDU版重量约40kg,单腿6个自由度(与人类相同),膝关节扭矩最大160 N*m,最大的脚踝96 N*m,单脚站立,最大关节速度为28rad/s。 相应地,膝关节在行走、跳跃或蹲下时需要承受的最大扭矩范围通常是100-250 N*m;人类步行时脚踝的扭矩约为20-30 N*m、在跑步或踢足等高强度运动中,脚踝扭矩可达50-100 N*m。 这意味着SA01具有接近人类中等强度的运动能力。
△SA01 据官方介绍,SA01 整机EDU版重量约40kg,单腿6个自由度(与人类相同),膝关节扭矩最大160 N*m,最大的脚踝96 N*m,单脚站立,最大关节速度为28rad/s。 相应地,膝关节在行走、跳跃或蹲下时需要承受的最大扭矩范围通常是100-250 N*m;人类步行时脚踝的扭矩约为20-30 N*m、在跑步或踢足等高强度运动中,脚踝扭矩可达50-100 N*m。 这意味着SA01具有接近人类中等强度的运动能力。  行走功耗低于200W,采用强化学习的算法框架和高效的动力模块方案。 SA01具有较高的可扩展性,支持机械臂等人形部件。官方展示Pro版本更多“人味儿”。 值得一提的是,众擎介绍了SA01整机全栈自研。双腿和臀部的电机是自主开发的,运动控制算法完全开源。
行走功耗低于200W,采用强化学习的算法框架和高效的动力模块方案。 SA01具有较高的可扩展性,支持机械臂等人形部件。官方展示Pro版本更多“人味儿”。 值得一提的是,众擎介绍了SA01整机全栈自研。双腿和臀部的电机是自主开发的,运动控制算法完全开源。  据报道,基于SA01,只有一名R&D人员可以在几天内调试可行走的人形机器人,即使算法模型被更改,机器人的鲁棒性和系统的可扩展性也得到了显著提高。 最近,中擎还发布了另一款人形机器人PM01,售价仅为8.8万元。 PM01高1.38米,重量约40公斤,全身自由度24,运动速度2米/秒。 颈部整体自由度增加,腰部自由旋转电机增加320度,进行各种复杂运动。支持类人的自然步态。
据报道,基于SA01,只有一名R&D人员可以在几天内调试可行走的人形机器人,即使算法模型被更改,机器人的鲁棒性和系统的可扩展性也得到了显著提高。 最近,中擎还发布了另一款人形机器人PM01,售价仅为8.8万元。 PM01高1.38米,重量约40公斤,全身自由度24,运动速度2米/秒。 颈部整体自由度增加,腰部自由旋转电机增加320度,进行各种复杂运动。支持类人的自然步态。 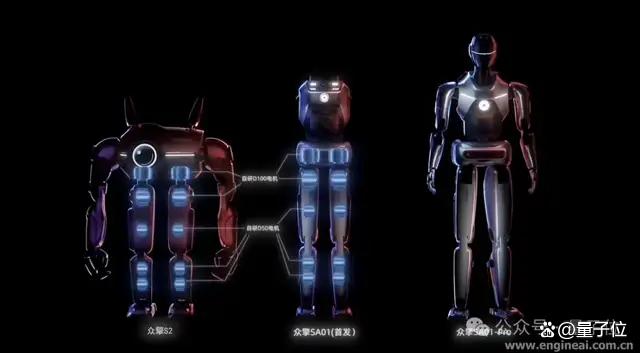 采用端到端神经网络方案。采用动捕技术收集大量人体数据,结合强化学习和模仿学习,其仿人能力与旗舰SE01相似。 与SA01相比,PM01具有更高的兼容性、更强的动态性能和更稳定的硬件。 基础架构采用x86架构,整合NVIDIA Jetson Orin高计算能力模块可以更好地满足多个开发者的科研需求,支持跨平台算法的无缝部署和验证。
采用端到端神经网络方案。采用动捕技术收集大量人体数据,结合强化学习和模仿学习,其仿人能力与旗舰SE01相似。 与SA01相比,PM01具有更高的兼容性、更强的动态性能和更稳定的硬件。 基础架构采用x86架构,整合NVIDIA Jetson Orin高计算能力模块可以更好地满足多个开发者的科研需求,支持跨平台算法的无缝部署和验证。  此外,在核心部件方面,中擎表示,它是世界上为数不多的同时拥有三种类型和十种关节的机器人公司之一。 行星准直驱关节常用于需要高精度和高扭矩的部位(如膝关节和腰关节)。 谐波力控关节可用于模仿人类动作,特别是需要高柔性和高精度的关节(如手腕和膝关节)。 滚珠丝杠直线关节常用于需要精确线性位移的场景。通过将旋转运动转化为直线运动,该关节具有高效、高精度、高刚度的特点。 众擎介绍,自主研发的动力关节力控精度达到0.2牛米,谐波和行星旋转关节扭矩覆盖24牛米至360牛米,力控推杆方案从4000牛推力到12000牛推力。能满足从四足到人形、从工业到生活服务的综合需求。
此外,在核心部件方面,中擎表示,它是世界上为数不多的同时拥有三种类型和十种关节的机器人公司之一。 行星准直驱关节常用于需要高精度和高扭矩的部位(如膝关节和腰关节)。 谐波力控关节可用于模仿人类动作,特别是需要高柔性和高精度的关节(如手腕和膝关节)。 滚珠丝杠直线关节常用于需要精确线性位移的场景。通过将旋转运动转化为直线运动,该关节具有高效、高精度、高刚度的特点。 众擎介绍,自主研发的动力关节力控精度达到0.2牛米,谐波和行星旋转关节扭矩覆盖24牛米至360牛米,力控推杆方案从4000牛推力到12000牛推力。能满足从四足到人形、从工业到生活服务的综合需求。  最后,他们还表示,他们的产品在价格上很有竞争力。
最后,他们还表示,他们的产品在价格上很有竞争力。  △大规模生产实拍,图源:中引擎机器人 那这家公司的师从何而来呢? 平均机器人领域的核心成员 该公司成立于2023年10月,总部位于深圳。 根据公开信息,大多数团队成员来自鹏行智能机器人的核心技术人员。目前,它拥有十多项覆盖机器人核心技术的核心专利,也是多年来鹏行智能s关节和ev关节、运动控制和整机设计的基础。 鹏行智能机器人是小鹏的机器人团队。 彭行智能创始人赵同阳是众擎的创始人。 联合创始人李海雷和关键人物徐哲都在鹏行智能(现小鹏鹏行)工作过。
△大规模生产实拍,图源:中引擎机器人 那这家公司的师从何而来呢? 平均机器人领域的核心成员 该公司成立于2023年10月,总部位于深圳。 根据公开信息,大多数团队成员来自鹏行智能机器人的核心技术人员。目前,它拥有十多项覆盖机器人核心技术的核心专利,也是多年来鹏行智能s关节和ev关节、运动控制和整机设计的基础。 鹏行智能机器人是小鹏的机器人团队。 彭行智能创始人赵同阳是众擎的创始人。 联合创始人李海雷和关键人物徐哲都在鹏行智能(现小鹏鹏行)工作过。  首先,赵同阳是机器人领域的连续企业家。 他的本科专业是自动化控制,2012年大学毕业后来到深圳创业。第一家公司安信可(当时)主要经营各种物联网专用模块,即物联网设备中使用的WiFi、各种模块,如蓝牙,GPS。 据赵同阳介绍,这次创业主要是为以后的机器人创业筹备资金。 2016年,他正式进入机器人行业,首先创建了终极进化技术,开始研究四足机器人。18年和19年,他创建了新的智能引擎和Dogtix(足够的机器人)。 然而,这些公司起初规模不大。最终进化一开始只有赵同阳一个人,后来慢慢扩展到五个,智能引擎创新只有四个人。 由于资金问题,终极进化技术和智能引擎创新难以继续,机器人公司推出了足够多的产品“不到波士顿动力机器狗的十分之一”四足机器狗。 后来也正是因为机器人足够多,赵同阳的团队才受到小鹏的青睐。2020年,小鹏收购了足够的机器人,并建立了鹏行智能。启信宝显示,鹏行智能注册资本5000万元,法定代表人为赵同阳。该公司由广东鹏行智能有限公司100%持股,何小鹏为广东鹏行智能有限公司董事长,持股65.1%,小鹏汽车持股19.9%;机器人创始人赵同阳持有15%的股份,担任法定代表人和总经理。
首先,赵同阳是机器人领域的连续企业家。 他的本科专业是自动化控制,2012年大学毕业后来到深圳创业。第一家公司安信可(当时)主要经营各种物联网专用模块,即物联网设备中使用的WiFi、各种模块,如蓝牙,GPS。 据赵同阳介绍,这次创业主要是为以后的机器人创业筹备资金。 2016年,他正式进入机器人行业,首先创建了终极进化技术,开始研究四足机器人。18年和19年,他创建了新的智能引擎和Dogtix(足够的机器人)。 然而,这些公司起初规模不大。最终进化一开始只有赵同阳一个人,后来慢慢扩展到五个,智能引擎创新只有四个人。 由于资金问题,终极进化技术和智能引擎创新难以继续,机器人公司推出了足够多的产品“不到波士顿动力机器狗的十分之一”四足机器狗。 后来也正是因为机器人足够多,赵同阳的团队才受到小鹏的青睐。2020年,小鹏收购了足够的机器人,并建立了鹏行智能。启信宝显示,鹏行智能注册资本5000万元,法定代表人为赵同阳。该公司由广东鹏行智能有限公司100%持股,何小鹏为广东鹏行智能有限公司董事长,持股65.1%,小鹏汽车持股19.9%;机器人创始人赵同阳持有15%的股份,担任法定代表人和总经理。 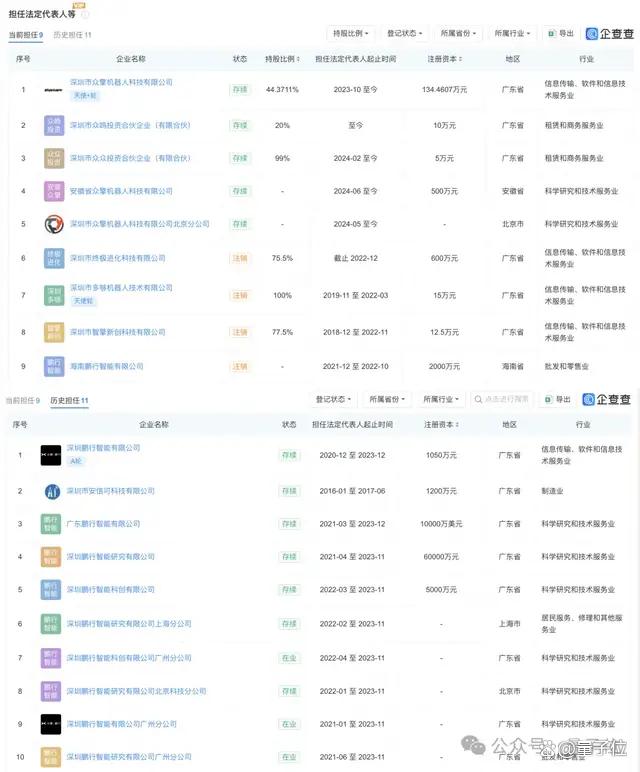 在鹏行期间,赵同阳率先开发了PX5双足机器人,具有出色的行走能力。 该机器人于2023年1024年小鹏科技日亮相。据介绍,可以在室内外大步行走,敏捷运动,抗扰越障,骑平衡车,自己倒水。
在鹏行期间,赵同阳率先开发了PX5双足机器人,具有出色的行走能力。 该机器人于2023年1024年小鹏科技日亮相。据介绍,可以在室内外大步行走,敏捷运动,抗扰越障,骑平衡车,自己倒水。  又是2023年,赵同阳智能地离开鹏行,重新创业。 据雷峰网报道,原因可能与内部路线的变化有关。赵同阳曾多次创业做足式机器人,但为了更快地落地,鹏行逐渐将四足改为轮式。 赵同阳、李海雷、徐喆也在鹏行相识。 李海雷出身于优必选,在优必选北研所做研究,由清华自动化系教授赵明国指导,时任北研所所长,负责机械部分。 2021年,优必选北方研究所负责人赵明国因身体原因离职,引发优必选研究所人事震荡,导致北方研究所彻底解散。优必选walker机器人团队的核心人物相继离职。 其中有李海雷。 离开优必选后,李海雷从北京到深圳,加入了鹏行智能。 但由于鹏行内部规模缩小、路线调整等问题,李海雷选择再次离开。 当时,赵同阳也离开鹏行开始创业,并接受了李海雷作为联合创始人。 徐哲是众擎机器人的另一个重要成员。 本科毕业于北京理工大学机械工程专业,师从高俊耀,前往卡内基梅隆大学联合培训,主要研究双足机器人步态规划。 后来,徐哲还加入了北京研究所,担任步态算法专家。 徐哲完成了大型四足机器人的算法部分。 后来,由于21年春节联欢晚会上优选机器狗的出现,优选研究人员也被各厂商竞争。当年3月,徐哲被小米挖走,在刚刚成立的机器人实验室担任高级算法工程师。 但后来小米的大部分人形机器人团队都离开了,徐哲也离开了小米,现在来到了众擎机器人。 目前,中擎机器人已成立1年零3个月,已完成天使轮和天使轮 融资。由商汤国香资本牵头的天使轮融资近亿元。 天使轮 融资金额未披露,投资者包括宏辉基金、迅商风险投资、合肥滨湖金融投资。
又是2023年,赵同阳智能地离开鹏行,重新创业。 据雷峰网报道,原因可能与内部路线的变化有关。赵同阳曾多次创业做足式机器人,但为了更快地落地,鹏行逐渐将四足改为轮式。 赵同阳、李海雷、徐喆也在鹏行相识。 李海雷出身于优必选,在优必选北研所做研究,由清华自动化系教授赵明国指导,时任北研所所长,负责机械部分。 2021年,优必选北方研究所负责人赵明国因身体原因离职,引发优必选研究所人事震荡,导致北方研究所彻底解散。优必选walker机器人团队的核心人物相继离职。 其中有李海雷。 离开优必选后,李海雷从北京到深圳,加入了鹏行智能。 但由于鹏行内部规模缩小、路线调整等问题,李海雷选择再次离开。 当时,赵同阳也离开鹏行开始创业,并接受了李海雷作为联合创始人。 徐哲是众擎机器人的另一个重要成员。 本科毕业于北京理工大学机械工程专业,师从高俊耀,前往卡内基梅隆大学联合培训,主要研究双足机器人步态规划。 后来,徐哲还加入了北京研究所,担任步态算法专家。 徐哲完成了大型四足机器人的算法部分。 后来,由于21年春节联欢晚会上优选机器狗的出现,优选研究人员也被各厂商竞争。当年3月,徐哲被小米挖走,在刚刚成立的机器人实验室担任高级算法工程师。 但后来小米的大部分人形机器人团队都离开了,徐哲也离开了小米,现在来到了众擎机器人。 目前,中擎机器人已成立1年零3个月,已完成天使轮和天使轮 融资。由商汤国香资本牵头的天使轮融资近亿元。 天使轮 融资金额未披露,投资者包括宏辉基金、迅商风险投资、合肥滨湖金融投资。 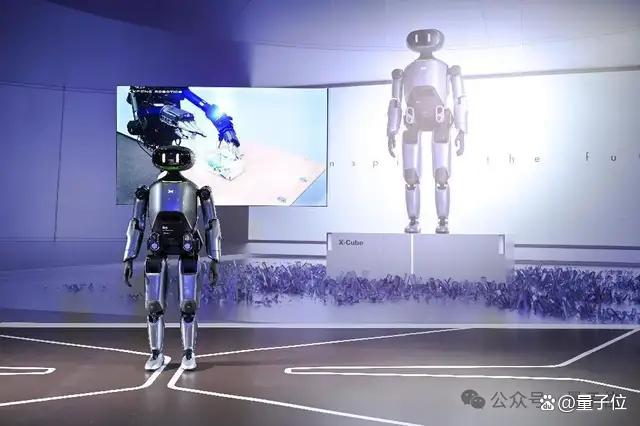
假如穿上衣服,甚至有模特走台阶的火到国外感觉。 Jim,英伟达科学家 Fan看了有点怀疑自己的人形人街眼睛:这是真的还是Sora合成?…… 毕竟,人形机器人的机器步态仍然充满了机器味,很容易摔倒。火到国外 网友们一扒,太神奇了。人形人街这个机器人刚刚发布了半个月,最近参加了CES。 在国内互联网上,另一个视角的视频也发布了。 网友们发现,这款人形机器人刚刚发布一个月。在官方视频中,它还可以做蹲起和俯卧撑。 当然,这个时候只剩下大家了“连续的amazing”了。 仔细看,这个国产机器人诞生于深圳,背后的公司成立不到一年半。大部分核心团队都是小鹏机器人团队和商汤投资的。 而且,它的成本并不高。 创始人赵同阳在接受采访时表示,该机器人的成本控制在10万元以内,产品的最终价格可能在15万元左右,两个月后可以小规模商业化。 人形机器人挑战俯卧撑 例如,上述人形机器人来自众擎机器人,这是他们最新发布的旗舰SE01。 根据众擎官方显示,SE01已经能够像真人一样在实验室环境中行走,步态非常接近。 而且还可以靠手臂和脚趾支撑,模仿人类做俯卧撑,动作是一个标准: 根据官网信息,SE01身高1.7米,相当于一半成年人,机身采用航空级铝材,整机净重55公斤。 SE01全身有32个自由度,正常行走速度为每秒2米(每小时7.2公里),电池寿命为2小时,使用寿命为10年。 在处理器方面,SE01由英伟达和英特尔控制。 在感知能力方面,SE01拥有英特尔RealSensense 配备360度激光雷达和6个高清摄像头的D435深度相机。 支持3D感知避障导航的多层规划算法可以自动选择最佳路径。 正如前面所说,SE01全身有32个自由度,其中12个在手(单手6个)、臂部8个(单臂4个)。 SE01的手臂可以通过肩部和肘部的谐波关节精确控制,并用绳子驱动柔性力控制,以确保动作的准确执行。 核心关节还可以实现精确的力控,最大扭矩186牛·力控精度可达0.2牛·米。 而且SE01核心关节的高性能部件都是众擎团队自主研发的。 简单总结一下,SE01的亮点在于下肢能力和超拟人步态。 然而,据路透社报道,它的稳定性仍有改善的空间,在外部演示中也遇到了滑倒和摔跤的问题。 有人还开玩笑说,背部的抓手是为了防止摔倒吗? 电机关节自主研发,运动算法开源 目前,中引擎机器人表现出几个特点: 坚持做双脚,价格低,强调开源。 目前众擎有三个产品系列: SA系列:面向科研教育场景的双足机器人,全开源SE系列:面向工业劳动场景的人形机器人,高负荷EV系列:适合家庭场景的人形机器人,第一款高可靠、长寿命的双足机器人SA01,售价仅为3.85万元。双腿和髋部电机都是自主研发的,运动算法完全开源。 但这还不是最低价。还有一个小尺寸的双足机器人,售价只有1.85万元。 △SA01 据官方介绍,SA01 整机EDU版重量约40kg,单腿6个自由度(与人类相同),膝关节扭矩最大160 N*m,最大的脚踝96 N*m,单脚站立,最大关节速度为28rad/s。 相应地,膝关节在行走、跳跃或蹲下时需要承受的最大扭矩范围通常是100-250 N*m;人类步行时脚踝的扭矩约为20-30 N*m、在跑步或踢足等高强度运动中,脚踝扭矩可达50-100 N*m。 这意味着SA01具有接近人类中等强度的运动能力。 行走功耗低于200W,采用强化学习的算法框架和高效的动力模块方案。 SA01具有较高的可扩展性,支持机械臂等人形部件。官方展示Pro版本更多“人味儿”。 值得一提的是,众擎介绍了SA01整机全栈自研。双腿和臀部的电机是自主开发的,运动控制算法完全开源。 据报道,基于SA01,只有一名R&D人员可以在几天内调试可行走的人形机器人,即使算法模型被更改,机器人的鲁棒性和系统的可扩展性也得到了显著提高。 最近,中擎还发布了另一款人形机器人PM01,售价仅为8.8万元。 PM01高1.38米,重量约40公斤,全身自由度24,运动速度2米/秒。 颈部整体自由度增加,腰部自由旋转电机增加320度,进行各种复杂运动。支持类人的自然步态。 采用端到端神经网络方案。采用动捕技术收集大量人体数据,结合强化学习和模仿学习,其仿人能力与旗舰SE01相似。 与SA01相比,PM01具有更高的兼容性、更强的动态性能和更稳定的硬件。 基础架构采用x86架构,整合NVIDIA Jetson Orin高计算能力模块可以更好地满足多个开发者的科研需求,支持跨平台算法的无缝部署和验证。 此外,在核心部件方面,中擎表示,它是世界上为数不多的同时拥有三种类型和十种关节的机器人公司之一。 行星准直驱关节常用于需要高精度和高扭矩的部位(如膝关节和腰关节)。 谐波力控关节可用于模仿人类动作,特别是需要高柔性和高精度的关节(如手腕和膝关节)。 滚珠丝杠直线关节常用于需要精确线性位移的场景。通过将旋转运动转化为直线运动,该关节具有高效、高精度、高刚度的特点。 众擎介绍,自主研发的动力关节力控精度达到0.2牛米,谐波和行星旋转关节扭矩覆盖24牛米至360牛米,力控推杆方案从4000牛推力到12000牛推力。能满足从四足到人形、从工业到生活服务的综合需求。 最后,他们还表示,他们的产品在价格上很有竞争力。 △大规模生产实拍,图源:中引擎机器人 那这家公司的师从何而来呢? 平均机器人领域的核心成员 该公司成立于2023年10月,总部位于深圳。 根据公开信息,大多数团队成员来自鹏行智能机器人的核心技术人员。目前,它拥有十多项覆盖机器人核心技术的核心专利,也是多年来鹏行智能s关节和ev关节、运动控制和整机设计的基础。 鹏行智能机器人是小鹏的机器人团队。 彭行智能创始人赵同阳是众擎的创始人。 联合创始人李海雷和关键人物徐哲都在鹏行智能(现小鹏鹏行)工作过。 首先,赵同阳是机器人领域的连续企业家。 他的本科专业是自动化控制,2012年大学毕业后来到深圳创业。第一家公司安信可(当时)主要经营各种物联网专用模块,即物联网设备中使用的WiFi、各种模块,如蓝牙,GPS。 据赵同阳介绍,这次创业主要是为以后的机器人创业筹备资金。 2016年,他正式进入机器人行业,首先创建了终极进化技术,开始研究四足机器人。18年和19年,他创建了新的智能引擎和Dogtix(足够的机器人)。 然而,这些公司起初规模不大。最终进化一开始只有赵同阳一个人,后来慢慢扩展到五个,智能引擎创新只有四个人。 由于资金问题,终极进化技术和智能引擎创新难以继续,机器人公司推出了足够多的产品“不到波士顿动力机器狗的十分之一”四足机器狗。 后来也正是因为机器人足够多,赵同阳的团队才受到小鹏的青睐。2020年,小鹏收购了足够的机器人,并建立了鹏行智能。启信宝显示,鹏行智能注册资本5000万元,法定代表人为赵同阳。该公司由广东鹏行智能有限公司100%持股,何小鹏为广东鹏行智能有限公司董事长,持股65.1%,小鹏汽车持股19.9%;机器人创始人赵同阳持有15%的股份,担任法定代表人和总经理。 在鹏行期间,赵同阳率先开发了PX5双足机器人,具有出色的行走能力。 该机器人于2023年1024年小鹏科技日亮相。据介绍,可以在室内外大步行走,敏捷运动,抗扰越障,骑平衡车,自己倒水。 又是2023年,赵同阳智能地离开鹏行,重新创业。 据雷峰网报道,原因可能与内部路线的变化有关。赵同阳曾多次创业做足式机器人,但为了更快地落地,鹏行逐渐将四足改为轮式。 赵同阳、李海雷、徐喆也在鹏行相识。 李海雷出身于优必选,在优必选北研所做研究,由清华自动化系教授赵明国指导,时任北研所所长,负责机械部分。 2021年,优必选北方研究所负责人赵明国因身体原因离职,引发优必选研究所人事震荡,导致北方研究所彻底解散。优必选walker机器人团队的核心人物相继离职。 其中有李海雷。 离开优必选后,李海雷从北京到深圳,加入了鹏行智能。 但由于鹏行内部规模缩小、路线调整等问题,李海雷选择再次离开。 当时,赵同阳也离开鹏行开始创业,并接受了李海雷作为联合创始人。 徐哲是众擎机器人的另一个重要成员。 本科毕业于北京理工大学机械工程专业,师从高俊耀,前往卡内基梅隆大学联合培训,主要研究双足机器人步态规划。 后来,徐哲还加入了北京研究所,担任步态算法专家。 徐哲完成了大型四足机器人的算法部分。 后来,由于21年春节联欢晚会上优选机器狗的出现,优选研究人员也被各厂商竞争。当年3月,徐哲被小米挖走,在刚刚成立的机器人实验室担任高级算法工程师。 但后来小米的大部分人形机器人团队都离开了,徐哲也离开了小米,现在来到了众擎机器人。 目前,中擎机器人已成立1年零3个月,已完成天使轮和天使轮 融资。由商汤国香资本牵头的天使轮融资近亿元。 天使轮 融资金额未披露,投资者包括宏辉基金、迅商风险投资、合肥滨湖金融投资。